在各種不同類型的數字電視(DTV)傳輸系統中,為了自始至終提供可靠的高質量的服務,最重要的就是必須關注那些對系統的完整性可能有所影響的各種因素。本應用文章介紹了這些關鍵的RF 測量參數,它有助于我們在覺察到服務水準和圖象質量降低之前就能檢測出系統中的潛在問題。

當信號在傳輸通道中出現噪聲、失真和受到干擾時,現代數字有線系統、衛星或地面系統的表現特性完全不同于傳統的模擬電視。現在的電視收看用戶已經習慣于模擬電視的接收方式,如果接收的圖象質量較差,通常是調整一下室外天線,這樣接收的圖象就可能要好一些。即便是圖象質量仍然很差,但如果節目的內容足夠吸引人,那么,只要還有聲音,觀眾仍會繼續收看。
DTV可不這樣簡單。一旦接收的信號中斷,要恢復信號的通路并非總是奏效。產生的原因可能是MPEG SI或PSIP表中出現錯誤,或者僅僅是由于RF 功率在數字工作門限電平以下或在“崩潰”(cliff)點電平以下。而RF 中的問題又可能由以下原因所引起:衛星碟形天線或低噪聲變頻器小盒(LNB)中的故障;地面RF 信號的反射;信道噪聲性能太差;信號傳輸通道中的干擾;有線放大器或調制器損壞等。
為了解決DTV信號的接收問題,可以有兩種解決方法。一種解決方案是使機頂盒接收機對劣化的信號不再敏感,但對工作人員來說更好的解決方案是始終保持清晰、高質量的RF 信號。
為此,泰克公司提出了關鍵RF 測量的解決方案,在這種解決方案中,集MPEG實時監視與記錄功能于一體,這就是MTM400監視器。從經濟上考慮,可以將MTM400配置在傳輸鏈路中的各監測點上,從下行鏈路和編碼處理,通過復用和再復用,直至經由上行鏈路、前端和發射機站點的最終傳送。
用MTM400來進行這項工作,工作人員只需投資其它專用RF測試設備費用的若干分之一,即可完成關鍵的RF測量。通過基于Web 的遙控設置,可在整個傳輸鏈路中的相應信號層面上進行正確的RF 測量,這樣的測量既經濟、又高效。
關鍵RF 測量參數
| RF 信號強度 | 接受到的信號有多強 |
| 星座圖 | 表征鏈路和調制器性能 |
| MER(調制誤差比) | 信號劣化的早期指示參數,它為信號功率與誤差矢量功率的比值,以dB 表示 |
| EVM(矢量幅度誤差) | EVM的測量與MER類似,它是RMS誤差矢量幅度與最大符號幅度的比值,以百分比表示 |
| BER(誤碼率) | BER 用來表征前向誤碼校正(FEC)的誤碼糾錯量。 BER =已校正的比特/所發送的全部比特 |
| TEF(傳輸錯誤標志) | TEF 用于指示FEC 無法校正所有的傳輸錯誤。 TEF 也稱為“未校正的里德-索羅門分組碼計數” |
BER 或誤碼率
誤碼率是錯誤比特與全部傳送比特之比。在早期的DTV監視接收機中,誤碼率作為數字信號質量的唯一測量值。誤碼率的測量簡單易行,因為它通常可由調諧解碼器芯片組提供且容易進行測量。不過,調諧器的輸出BER 通常是在前向誤碼校正(FEC)之后,最好是在FEC(“前維特比”)之前來測量BER。這樣,通過測量BER可以反映出FEC的校正能力。在維特比去交織之后,采用里德-索羅門(Reed-Solomon,R-S)解碼可以校正錯誤比特以在輸出端獲取準無誤碼(quasi error-free)信號。
如果傳輸系統的工作狀況遠離信號崩潰點,這種運行狀態是合適的。這時,只有很少的數據錯誤發生,前維特比(pre-Viterbi)誤碼率接近為零。如果傳輸系統工作在崩潰點邊緣附近,則前維特比BER 就會逐漸增加,后維特比(post-Viterbi)BER的變化就比較徒峭,后FEC(在RS之后)就非常徒峭。
因此,FEC能夠對崩潰點的徒峭程度產生影響。這樣,非常靈敏的誤碼率測量的確會產生告警信號,但對于要采取的校正而言,通常又顯得太遲。
對于被傳送信號質量的定量測試和運行記錄而言,顯示BER仍然是有用的。BER通常用來記錄長時間的系統運行狀態。最好是用來識別周期性損傷、瞬態損傷。
BER 的測量值常常用工程記數法來表示,并標明為瞬時碼率和平均碼率。
典型的目標誤碼率為:1E-09,準無差錯的誤碼率為2E-04;臨界誤碼率為1E-03;當誤碼率大于1E-03 時則處于傳輸服務允許值之外。
如何改善BER -通過MER
TR101 290標準是用來描述DVB系統的測量準則。在標準中,調制誤差比(MER)指的是被接收信號的單個“品質因數”(figure of merit)。MER往往作為接收機對傳送信號能夠正確解碼的早期指示。事實上,MER 是用來比較接收符號(用來代表調制過程中的一個數字值)的實際位置與其理想位置的差值。當信號逐漸變差時,被接收符號的實際位置離其理想位置愈來愈遠,這時測得的MER 數值也會漸漸減小。一直到最后,該符號不能被正確解碼,誤碼率上升,這時就處于門限狀態即崩潰點。
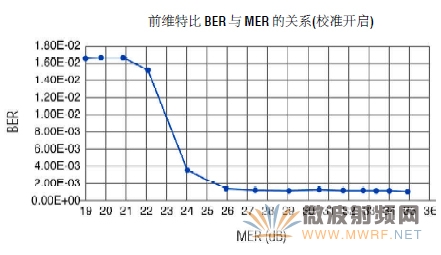
圖1. 64-QAM 接收機的MER 測量曲線
圖1 是將MER 接收機與一測試調制器相連接時所測得的曲線。連接妥當后,逐漸引入噪聲,同時記錄MER 和前維特比BER 的數值。在沒有引入噪聲時,MER 的起始值為35dB,而BER 接近為零。隨著噪聲的增加,MER 值逐漸降低,而BER卻保持恒定。當MER降低至26dB附近時,BER 才開始攀升,說明崩潰點就在此值附近。因此,MER可用來指示系統在崩潰點之前的早期劣化漸變過程。
MER 的重要性
泰克公司設備能夠測量非常高的極限MER值(在QAM系統中,極限MER的典型值為39dB),因此,如果下游MER的縮減因子(安全余量)是已知的,或者可在用戶點(或其附近)測出MER 的安全余量,那么,位于前端調制器處的監視設備通過測量MER即可提供信號劣化的早期指示。當MER 下降至24dB(64-QAM)或30dB(256-QAM)時,通用機頂盒就不能正確解調。至于其它的一般測量設備,只能給出較低的極限MER 測量值,因此也就不能用于信號劣化的早期告警。
對于數字有線(QAM)前端,典型的MER值為35dB至37dB。而在模擬有線系統中,典型的MER 值為45dB。模擬系統和數字系統的MER差值為10dB,在數字分配系統中,MER值在35dB 左右。
EVM(誤差矢量幅度)
EVM的測量與MER有些相似,但表示方法有所不同。EVM是誤差矢量的RMS幅度與最大符號幅度之比,并以百分比來表示。信號損傷增加時,EVM 增加;信號損傷降低時,EVM 減小。
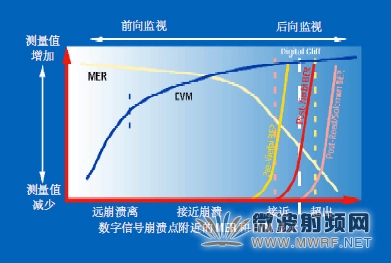
圖2. 通過測量MER 和EVM,能在BER 迅速攀升和接收信號中斷之前預測出系統的安全余量。
MER和EVM 可以相互導出。EVM 是IQ(同相軸和正交軸)星座圖中被檢測載波與理論上的理想著陸點(landingpoint,參見圖3)之間的距離,即為“誤差信號矢量”與“最大信號幅度”的比值,并用RMS 百分比數值來表示。EVM 是按照TR 101 290 的附件部分作出的定義。泰克公司的MTM400,既可以測量MER,也可以測量EVM。
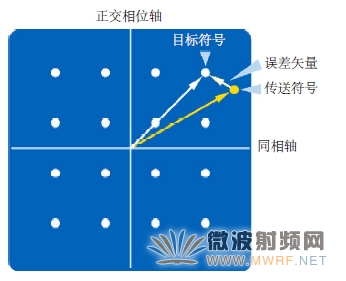
圖3. 誤差矢量。
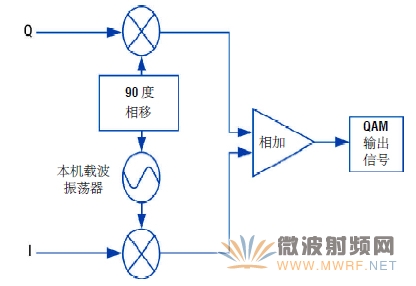
圖4. QAM 調制器。
 粵公網安備 44030902003195號
粵公網安備 44030902003195號