中國無人機發展概況
從2014年起,全球無人機行業經歷了井噴式的發展,中國無人機領跑世界。另一方面,無人機行業與市場面臨著監管的難題,空中愈來愈多的無人機,引發了人們對無人機使用安全事故和社會治安等風險問題的擔憂,也引起了國家監管層與社會各界的極大關注。截止目前,國內已經多次出現無人機干擾民航起降,以及在重大活動中未經審批私自遙控飛行等行為。
無線電管理局主要負責無人駕駛航空器系統頻率資源的規劃指配及非航空頻段無線電發射設備監管等。工信部無管局已發布《關于無人駕駛航空器系統頻率使用事宜的通知》,各級無線電管理工作者也在探索使用無線電監測、定位、干擾、壓制等技術手段來管理和規范無人機的合規使用,促進產業健康發展。
是德科技定位無人機控制源的研究
在無人機管控的技術手段中,快速識別和定位無人機控制信號發射源是一種有效的方式。目前民用無人機大多在視距內飛行,空曠區域最大控制距離為2千米到5千米,城市環境控制距離更短,有利于技術手段快速定位。大多數民用無人機工作在2.4GHz和5.8GHz非授權頻段,在這些頻段無線局域網、工科醫設備、無繩電話等各種無線電業務非常擁擠。如何在擁擠的無線電業務中快速識別隱藏的無人機控制信號,從而進行定位是主要的技術難點。由于頻譜重疊和功率限值相同,傳統的最大場強定位、側向交叉定位等方法都很難識別和定位無人機控制信號。
本文討論基于信號識別和到達時間差(TDOA, Time Difference of Arrival)定位無人機控制源的方法,介紹了定位距離的仿真結果,以及系統整體安裝配置。無人機控制源監測定位系統基于是德科技N6820ES信號監測定位軟件和N6841A室外小型監測接收機。
1、無人機控制信號識別
對于工信部無管局規劃的840.5MHz-845MHz、1430MHz-1444MHz和2408MHz-2440MHz無人駕駛航空器系統工作頻段以及5.8GHz非授權頻段,無人機監測定位系統支持分段掃描、信道掃描和信號識別歸類,對于識別的無人機控制信號自動定位控制信號發射源。系統也可以添加對無人機視頻回傳信號的識別,進而定位無人機的位置。
N6820ES軟件繼承了安捷倫/是德科技傳統“黑鳥”無線電監測系統的能量檢測、信號識別、信號分類和通用信號檢測(USD,Universal Signal Detection)功能。N6820ES成熟的能量檢測算法可以準確快速的發現監測頻段內所有感興趣的信號。通用信號檢測器(USD,Universal Signal Detector)允許用戶通過自定義的條件來識別無人機控制信號。USD包含三個協同或獨立工作的條件來識別無人機控制信號:
· 頻率計劃,包含監測頻段、工作信道和獨立頻點等;· 帶寬濾波器;
· 寬帶頻譜特征檢測器;
寬帶頻譜特征檢測器是識別無人機控制信號的有效手段,實際測試中非常準確的區分了不同類型的設備。檢測器算法包含頻譜特征相關算法、峰值比較法和限值比較法。頻譜特征相關算法如圖1所示,寬帶頻譜特征檢測器利用相關算法比較每段頻譜的特征是否匹配,當頻譜特征匹配兩次以上時,觸發系統執行告警、定位、調制識別、記錄等任務。
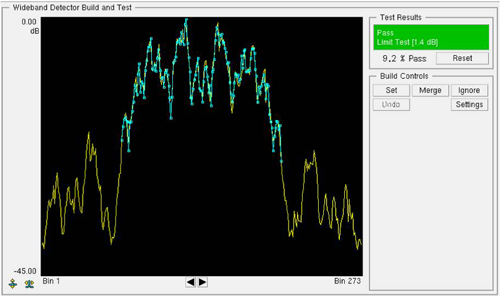
圖1、USD寬帶頻譜特征檢測的無人機控制信號
USD功能支持將監測到的信號頻譜記錄為頻譜特征條件、用戶自定義頻譜特征條件和文件導入頻譜特征條件,保證系統對無人機信號的識別能力可以跟隨技術和產品的發展不斷更新。系統預定義的無人機控制設備和USD編輯界面如圖2所示:

圖2、預定義無人機控制信號及USD編輯界面
無人機控制信號常用跳頻工作模式。N6820ES 和N6841A組成的監測定位系統具有精確的時間同步和信號回放分析功能,支持對此類信號的識別和定位。N6841A傳感器網絡采用GPS或IEEE-1588協議進行同步掃描。對于20MHz帶寬的IQ數據,每個傳感器內置緩存可以記錄4.8秒。系統同步每個傳感器接收的數據,對于識別到的跳頻信號,直接定位或者調用傳感器緩存的數據執行定位算法。圖3為系統實際測試中分段掃描并識別的四款無人機控制信號:

圖3、N6820ES分段掃描和識別歸類四款無人機控制信號
2、監測和定位作用距離
無人機控制信號的定位使用N6841A小型室外監測接收機組成的TDOA網絡實現。通常需要布置至少四臺移動或可搬移監測站,站點間距離1~2公里。每個站點既可以執行常規信號監測任務,又可以執行TDOA定位。TDOA定位的具體步驟本文不做介紹,只對無人機控制信號發射源的定位距離進行分析。
無人機控制信號被識別和定位的距離受地形地貌、無人機監測站點天線的安裝高度、無人機工作頻段等多種因素影響。后續的仿真分析基于下面兩個假設條件:
· 無人機控制器發射帶寬2MHz,發射功率100mW(20dBm);· 監測接收機天線安裝高度5米。
監測和定位范圍的仿真分為三種不同的地形地貌傳輸模型:城郊非視距傳輸(Suburban Non-Line of Sight),城郊視距傳輸(Suburban Line of Sight)和農村視距傳輸(Rural Line of Sight)。視距模型中假設地面無人機控制器在監測天線可視范圍內,兩者間沒有明顯的障礙物遮擋。非視距傳輸模型假設監測天線和無人機控制器之間有明顯的障礙物阻擋信號傳輸。
基于Wireless World Initiative New Radio consortium (WINNER I and II)提供的傳輸模型,對工作在不同頻段的無人機控制器,監測系統作用距離仿真結果如表1所示:
| 無人機控制器工作頻段? | ISM 5.8 GHz | ISM 2.4GHz |
| 監測系統作用距離? | ||
| 城郊非視距傳輸(Suburban NLOS) | 150 m | 300 m |
| 城郊視距傳輸(Suburban LOS) | 1.6 km | 2 km |
| 農村視距傳輸(Rural LOS) | 2 km | 2.5 km |
表1、無人機控制信號監測定位距離的仿真分析結果
是德科技提供了傳感器布置和優化工具(SPOT,Sensor Planning and Optimization Tool)用于無人機控制源監測定位站點的布置。使用SPOT建模和仿真工具,可以為監測和保障的重點區域提供最佳覆蓋。圖4為SPOT工具仿真的單個無人機控制源監測定位站點覆蓋范圍。

圖4、是德科技SPOT工具仿真的無人機控制源監測定位站點覆蓋范圍
3、無人機控制源監測定位系統配置
無人機控制源監測定位系統主要由N6820ES監測軟件和N6841A小型室外監測接收機組成。N6820ES軟件實現無線電監測信號的識別和定位結果輸出,N6841A組成的室外站執行信號監測和定位。建議布置四臺或四臺以上室外監測站點用于信號監測和TDOA定位。每套室外監測站點的配置如圖5所示:
· 5米的可伸縮天線桿;· 是德科技N6850A寬帶全向天線(WBOA),工作頻率20MHz到6GHz;
· 低噪聲放大器,電源,USB電池組和附件;
· 4米的N型室外射頻電纜;
· N6841A監測接收機,頻率范圍20MHz到6GHz,帶GPS天線,IP67防護,交流供電;
· 轉運箱;
· 8小時工作鋰電池和充電器;
· 50米室外帶屏蔽網線;

圖5、室外可搬移監測站點配置
4、總結
上文介紹了基于信號識別和TDOA定位對無人機控制信號進行監測定位的方法,在不同環境多次實驗中驗證了系統良好的工作效果。為了促進無人機產業的健康發展,引導用戶合規高效的使用無人機開展業務,并且減少和降低其帶來的各種風險,各級無線電工作者都在探索和鉆研無人機管控的技術手段。通過本文的討論,為大家提供一個無人機管控的新思路,與大家一起探索前行。
關于是德科技
是德科技(NYSE:KEYS)是全球領先的電子測量公司,通過在無線、模塊化和軟件解決方案等領域的不斷創新,為您提供全新的測量體驗。是德科技提供電子測量儀器、系統以及軟件和服務,廣泛應用于電子設備的設計、研發、制造、安裝、部署和運營。2015 財年,是德科技收入達29 億美元。
 粵公網安備 44030902003195號
粵公網安備 44030902003195號