近來,通信和導航工程師越來越傾向在全球定位系統(GPS)中采用軟件技術。1,2 由于超大規模集成電路的發展,性能強大的CPU和DSP能夠通過軟件對GPS信號進行實時檢測和解碼。這些基于軟件的GPS接收機具有相當強的靈活性:只需修改設置參數即可適應新的應用,無需重新設計硬件,選擇一個IF,就可完成進一步的系統升級。
利用MAX2769 GPS接收機RF前端芯片,簡單的USB dongle或PCI Express® (PCIe®)迷你卡就可以為筆記本電腦增加低成本的GPS功能。MAX2769將接收到的原始數據傳輸到PC主機,PC主機利用軟件實現基帶解碼,從而省去了單機GPS系統所需要的基帶ASIC的成本。簡單的說,MAX2769使設計人員可以利用單芯片實現GPS和Galileo系統信號處理的適配器。
本文給出了GPS系統的工作狀態概述,并詳細描述了Maxim的基于軟件的GPS接收機方案。
GPS基本原理
GPS系統包含24顆空間衛星或空間運載器(每個都用唯一的偽隨機噪聲編碼識別)、地面控制站以及用戶設備(接收機)。對于民用GPS和Galileo系統,這些衛星通過頻率為1.57542GHz的L1波段進行通信。3 GPS接收機必須捕獲到至少四顆衛星的信號才能進行可靠定位,信號捕獲和跟蹤非常復雜,因為每顆衛星和接收機的位置時刻都在變化。
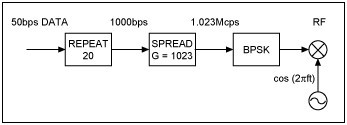
圖1. 民用GPS信號發生器采用擴頻技術發送信號。
GPS信號
GPS系統實際上是一個簡單的擴頻通信系統。4 圖1提供了一個民用GPS系統的信號發生電路。首先,50bps的導航信息重復20次,形成1000bps的比特流。然后這個重復信號被長度為1023碼片(偽隨機噪聲(PRN)碼的碼速)的唯一粗調/捕獲碼(C/A)進行擴頻,形成1.023Mcps的基帶信號。此用這種擴頻方法后,43dB大小的GPS系統的總處理增益(G)可以很好地恢復比熱噪聲電平低得多的信號。
每顆衛星都有唯一的C/A碼或者說Gold碼。5 由于具有很好的自相關和互相關性,Gold碼被廣泛用于各種CDMA通信系統,如WCDMA和cdma2000®。基帶信號經過二元相移鍵控(BPSK)調制后被上變頻到L1波段進行傳輸。
信號捕獲
因為GPS是一種CDMA通信系統,所以作為解調數據的先決條件,接收機必須與PRN碼進行同步。實現代碼同步通常需要兩個步驟:用來實現粗對準的代碼捕獲和用來實現精細對準的代碼相位跟蹤。6 更明確地講,GPS接收機必須首先確定它對某顆衛星是否具有視距上的可視性。我們知道,每顆衛星都由唯一的C/A碼來區分。當衛星可視時,由捕獲過程判斷信號的頻率和代碼相位,然后確定相應的解調參數。由于存在多普勒效應,根據衛星相對于接收機的速度,接收信號的頻率一般會偏移標稱值5kHz到10kHz。
在接收器端,GPS信號首先被下變頻到同向和正交(I和Q)分量信號。再由一對I和Q相關器將I/Q基帶信號與本地PRN序列進行相關運算。經過一個比特周期的積分后,I-Q相關器的輸出被累加起來以提供輸出判定變量。
只要判定變量超過一定的門限,系統就認為成功地實現了捕獲,繼而進入跟蹤模式。否則,就通過調節本地PRN序列的相對相位和振蕩器頻率,來更新判定變量,并重復上述過程。
串行搜索方法的簡單邏輯結構使它非常適合用ASIC實現,而用軟件實現就不切實際了,因為搜索空間非常大。假設系統允許500Hz的載波頻率偏移,多普勒頻率是10kHz,軟件實現需要的搜索空間大概為2 × (10,000/500) × 1023 = 40,920。很明顯,用軟件實現串行搜索捕獲比較困難。
另外一種更簡單的軟件捕獲方法叫做頻域并行代碼相位捕獲。這種方法將多普勒頻率和代碼相位搜索合并起來,在經過PRN碼的快速傅立葉變換(FFT)后,將所有代碼相位信息轉換到頻域內。這樣我們只需要搜索多普勒頻移上的空間即可,因此這是一種快速高效的軟件搜索方法。
首先,將輸入信號與本地正弦和余弦載波(同向I和正交Q信號分量)分別相乘。然后把I和Q分量合并成一個復合信號輸入到FFT模塊。傅立葉變換的結果再和PRN碼的FFT變換結果相乘(PRN生成器產生代碼相位為零的代碼)。實際上,FFT運算和PRN碼的產生可以采用列表的方法,以降低運算的復雜性。
最后,輸入信號與本地代碼的乘積(該乘積代表了輸入信號和載波頻率的相關性)被送到傅立葉逆變換模塊,該模塊的自乘輸出結果再被反饋到判定邏輯。基于FFT的頻域計算被證實具有較小的運算量。例如之前提到的那個例子, 捕獲運算的復雜性大概為20,000/500 = 40次FFT運算操作。
串行搜索方法具有簡單的邏輯和控制架構,非常適合ASIC實現。然而,巨大的搜索空間增加了軟件算法的復雜性。所以對于軟件GPS接收機來說,串行搜索方法并不是一個好的選擇。相反,并行代碼捕獲方法的低復雜性使它很適合用軟件實現。然而,它的邏輯架構遠比串行搜索方法復雜,因此很難用ASIC實現。
跟蹤細調
捕獲過程建立了對GPS信號的頻率和代碼相位參數的粗校準。因此,跟蹤的目的是進行細調,以便系統能用精確的代碼相位和頻率信息解調出數據。跟蹤包括代碼相位跟蹤和載波頻率跟蹤。
代碼跟蹤用延時鎖相環(DLL)實現,如圖2所示。DLL電路把輸入信號乘以PRN碼的三個復制碼(間隔±0.5碼片),這三個復制碼分別代表和輸入信號相比提前、準時和落后到達。經過綜合后,這些信號分別代表輸入信號和本地復制碼之間的相關性。具有最高相關值的信號被選中保留下來(圖3)。
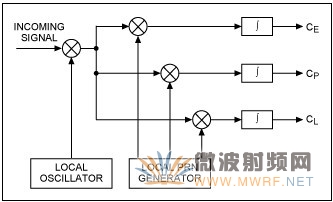
圖2. 使用延時鎖相環作代碼跟蹤幫助細調,以便系統能用精確的代碼相位和頻率信息解調出數據。
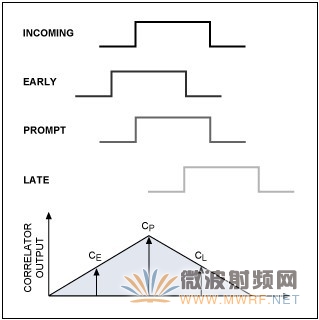
圖3. DLL電路把輸入信號乘以PRN碼的三個復制碼(間隔±0.5碼),這三個復制碼分別代表和輸入信號相比提前、準時和落后到達。具有最高相關值的信號被選中保留下來。
載波頻率跟蹤由鎖相環(PLL)或者Costas環路完成。8 載波跟蹤的目的是把本地頻率調節為輸入信號的實際頻率。
當捕獲和跟蹤過程建立起初始同步后,系統能夠解碼出導航比特。將1.023Mcps的輸入信號解擴為1000bps的比特流后就開始解調數據。然后利用比特同步從1000bps的數據流中恢復出50bps的信息。比特同步需要通過尋找零交叉沿(0V)來識別比特流的起始位置。如果這個交叉沿是已知的,我們可以用20ms的間隔分割1000bps輸入流,因為導航數據信息(50位)的持續時間為20ms。最后,以20ms間隔排列的比特取樣累加起來取平均值,從而解碼出導航數據。
基于軟件的GPS接收機
傳統的GPS接收機采用ASIC實現信號捕獲、跟蹤和位同步操作,而軟件GPS接收機用軟件代替硬件實現這些功能,因此具有更高的靈活性。通過簡化硬件架構,基于軟件的設計能夠進一步縮小接收機尺寸,降低成本,并具有更高效率。程序可以使用C/C++、MATLAB®或其它語言編寫,并可移植到各種操作系統中(嵌入式操作系統、PC、Linux和DSP平臺)。由此看來,軟件GPS接收機能夠為移動終端、PDA及其它類似設備提供最大的設計靈活性。
對于筆記本電腦,設計人員可以設計USB dongle (可配合任何帶USB端口的筆記本電腦一起工作)。對于新一代帶有PCIe迷你卡連接器的筆記本電腦,可以把RF前端置于PCIe迷你卡上,并把它插入PC內部(圖4a,圖4b)。PCIe迷你卡接口包含一個USB口,因此,前端適配器設計對于USB和PCIe迷你卡而言非常相似。主要區別在于:支持PCIe需要不同的電源管理邏輯電壓,需要處理不同的直流電壓(PCIe為3.3V,外部USB端口為5V)。
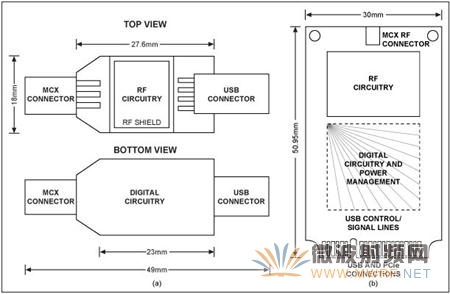
圖4. 針對USB dongle (a)、PCIe迷你卡(b)的典型適配器結構,為兩種方案均可提供了簡單、低成本的設計。
從圖5b所示USB dongle框圖可以看出該方案非常簡單,只使用了一個通用GPS接收器MAX2769、一個計數器和USB接口控制器,即可捕獲信號,并將其轉換成數字信號,最終傳遞給PC主機。然后,通過運行PC主機軟件執行所有基帶功能,將定位信息顯示在PC 顯示器上。這樣,筆記本PC 便成了一個強大的GPS設備,可支持導航和基于定位的服務。
GPS前端通過工業標準USB 2.0接口把數字化的IF數據傳輸到筆記本電腦。軟件基帶程序利用輸入數據計算出位置方位并隨后執行跟蹤過程。Geotate是可選的一個軟件來源。
為提供通用接口,此軟件能創建一個虛擬COM端口,使其可以連接到很多現有的導航和定位應用。大部分GPS軟件包接口符合NMEA 0183標準,通常都可以運行在Microsoft的Windows® XP和Windows Vista®操作系統中。另外,此軟件能夠處理所有可得的輔助數據,此數據可以從工業標準協議或者用戶專有的接口取得。
當前的筆記本電腦里所帶的CPU均具備滿足軟件GPS接收機實時解碼所需的運算能力。當在1GHz Pentium® M系統中,跟蹤過程中平均處理器負載大約為6%;而在2.18GHz Core™ Duo處理器上,在執行每秒更新時,處理器負載通常低于5%。隨著算法的發展,有可能把CPU的使用率降低到2%以下。
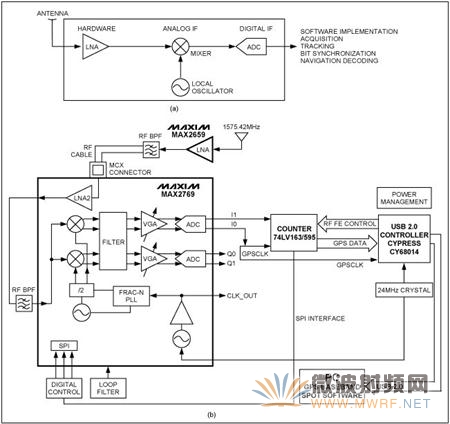
圖5. (a)軟件GPS接收機中,需要對捕獲的RF信號進行放大、變頻、數字化。(b)實際接收機中,低噪聲放大器對RF信號進行放大,MAX2769對放大后的信號進行變頻和數字化處理。然后,通過計數器和USB接口控制器將數據按照USB協議傳輸給PC主機。
電路工作原理和性能
基于軟件的GPS接收機RF前端首先使用低噪聲放大器(LNA)放大微弱的輸入信號,然后經過下變頻將信號轉換到較低頻率(4MHz左右)的IF (圖5a)。下變頻器采用一路或兩路混頻器對輸入RF信號和本機振蕩器信號進行混頻,通過模/數轉換器(ADC)把生成的模擬IF信號轉換成數字IF信號。
MAX2769將所有功能電路(LNA、混頻器和ADC)集成到一起,可大大縮短產品的開發時間。該芯片提供了兩個LNA:其中一個LNA具有低至0.9dB的噪聲系數、19dB增益、-1dBm的IP3,可配合無源天線使用;另一個LNA則具有1.5dB的噪聲系數、較低增益/功耗和較高的IP3,可配合有源天線使用。2.8V供電時,消耗的電流最小,且僅為13mA至18mA,具體取決于電路配置。
RF端,在放大器之后通常使用外部RF濾波器。然后使用集成的20位,Σ-Δ N分頻合成器和15位整數分頻器將信號直接下變頻到0至12MHz所要求的IF頻率。IF濾波器的選擇范圍較廣,可以適應不同的架構,例如Galileo。
從RF輸入至IF輸出的總增益能夠在60dB至115dB范圍內調節或進行自動控制。輸出可以選擇為模擬、CMOS或有限差分。內部ADC具有可設置的一到三位輸出。集成參考時鐘振蕩器可以使用晶體或溫補晶振(TCXO),也可以使用8MHz至44MHz頻率范圍的輸入參考時鐘。
我們利用MAX2769和工作在24MHz參考時鐘的Cypress Semiconductor的USB控制器構建了一個簡單的USB dongle參考設計(如圖5 b 所示)。該設計利用一路MAX8510 LDO調節直流電源。通過3線(SPI™)數字總線對MAX2769的寄存器進行編程。系統也可以在沒有SPI控制的情況下工作在八種硬件模式的任意一種。
芯片內的電路對有源天線進行偏置,關斷模式下將天線關閉,滿足USB規范。MAX2769能夠檢測到天線電源是否有電流消耗,并自動切換LNA1和LNA2,對于能夠插入靈敏度更高的有源天線替代無源天線的應用,這是一個非常理想的功能。設計人員只需要把外部天線端口連接到LNA2,把內部端口連接到LNA1。插入外部天線時,MAX2769將檢測到吸電流,可自動由LNA1切換到LNA2。
MAX2769為筆記本電腦、手機、PDA和汽車應用提供了一個高性能、緊湊的解決方案。利用已經商用化的GPS軟件包,115dB的總電壓增益和1.4dB的模塊噪聲系數能夠達到-143dBm 的捕獲靈敏度和-154dBm的跟蹤靈敏度。
結論
軟件技術可實現簡單的、低成本GPS應用。為支持這些可能性,MAX2769為軟件GPS接收機和傳統的硬件實現方法提供靈活的頻率規劃。當然,每種方案都有正反面—軟件GPS接收機需要高性能的處理器和適量的內存。然而,隨著軟件的發展,對時鐘、數據更新速率進行合理的選擇,需要的內存可以最小化。
參考文獻
1.Kaplan, E., Understanding GPS: Principles and Applications, 2nd ed. (Norwood, MA: Artech House Publishers, 1996).
2.Bao-Yen Tsui, J., Fundamentals of Global Positioning System Receivers: A Software Approach, 2nd ed. (New York: John Wiley & Sons, Inc., 2004).
3.關于導航信息和定位計算,請參考Bao-Yen Tsui, Fundamentals of Global Positioning System Receivers.
4.Viterbi, A., CDMA: Principles of Spread Spectrum Communications (Reading, MA: Addison Wesley Longman Publishing Co., Inc., 1995).
5.Gold, R., "Co-optimal binary sequences for spread spectrum multiplexing," IEEE Transactions on Information Theory, Vol. 13:4 (October 1967). pp. 619–621.
6.Ziemer, R.E., and Peterson, R.L., Digital Communications and Spread Spectrum Systems (New York: Macmillan Publishing Company, 1985).
7.Proakis, J. G., Digital Communications, 4th ed. (New York: McGraw-Hill, 2000).
8.Ibid.
 粵公網安備 44030902003195號
粵公網安備 44030902003195號