人類在掌握電磁波技術的50年以后,發展出了無線電雷達技術,它在第二次世界大戰中嶄露鋒芒,發揮了巨大的作用。在隨后的20年中,由于激光和光電子技術的快速發展,使得人們能夠把激光,這個特殊的電磁波應用于雷達,發展成為激光雷達。激光雷達在方向性、穩定性、分辨率和探測距離等諸多方面都有了巨大進步,現在已經廣泛地進入民生領域,尤其是智能網聯車、智能機器人、自動導引車、虛擬現實、增強現實等等,市場非常廣闊。
傳統的激光雷達由數目龐大的光學器件組成,體積大、成本高、價格昂貴。以Velodyne公司型為HDL-64激光雷達為例,重量為15公斤,成本高達八萬美元。
隨著硅基光電子集成技術的迅猛發展,硅基光子學技術已被廣泛研究,在一個芯片上可以集成成千上萬個光電子器件,此技術適用于制作激光雷達的光發射模塊,稱為光控相控陣。利用硅基光電子集成技術制作的光控相控陣芯片,工作在光通信波段(~1550 nm),相比傳統的工作在可見光波段和近紅外波段的器件來說,此工作波段對人眼更安全,有利于激光雷達產品進入民生領域。同時由于硅基光電子技術與集成電路技術完全兼容,可在單片上同時集成光束掃描器件和控制集成電路,有利于實現智能化控制和神經網絡集成等。
光控相控陣的基本原理
光控相控陣基本原理如圖1所示,它是一種光束指向技術。激光光源經過光分束器后進入光波導陣列,在波導上通過外加控制的方式改變光波的相位,利用波導間的光波相位差來實現光束掃描,其原理類似于多縫干涉。
光波導陣列中的每根波導都相當于一個光發射源,每個光發射源都相當于多縫干涉中的狹縫。光在空間中傳播并干涉,其結果是光在某一方向上因干涉加強而集中,在其他方向上因干涉相消而減弱,從而改變光束的傳播方向,實現掃描。
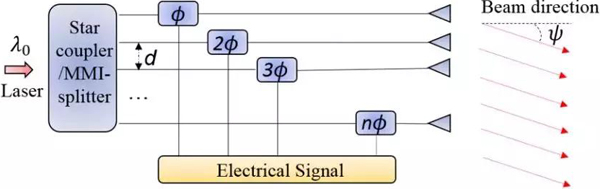
圖1、光控相控陣掃描基本原理示意圖
技術進展
硅基光電子集成光控相控陣最早可追溯到1997年,美國加利福尼亞大學在絕緣體上硅晶片上制作了波長多路復用器,用陣列波導結構實現了利用波長調節光束角度的功能。此后,德克薩斯州大學、加州大學、麻省理工大學等先后開展了關于此項技術的研究。
相控陣的一維掃描主要分為兩種方式:
一種為利用熱光相位調制實現光束掃描,這種方法只需要單色的激光源,掃描角度較大,缺點是片上需要集成電極,復雜度增加;
另一種為利用波長實現光束掃描,這種方法需要可調諧的激光源,掃描角度較小。
此后,結合上述的兩種方法,各機構先后報道了性能各異的二維掃描相控陣,其中具有代表性的為以下所述。
2013年,美國麻省理工學院將4096(64×64 )個光柵發射天線集成在一塊SOI芯片上,圖2(a)為大規模納米光控相控陣示意圖,插圖為單個天線的特寫,每個波導天線的尺寸為9 μm×9 μm。圖2 (b )為部分結構的電子顯微鏡照片,圖2(c)為單個天線的電子顯微鏡照片。封裝后整體芯片尺寸為576 μm ×576 μm。對采用此種結構8×8大小的組合進行測量,波長為1550 nm的激光源耦合到工作的總線波導上,光功率在納米天線中均勻分布,嵌入式的相位調諧使得不同模塊之間的光互相結合后產生一個期望的遠場輻射模式,此遠場輻射模式可以根據不同要求動態變化。

圖2、(a)大規模納米光控相控陣示意圖,插圖為單個天線的特寫;(b)部分結構的電子顯微鏡(SEM)圖;(c)單個天線的電子顯微鏡照片;
2015年美國加利福尼亞大學在單片上集成包括激光光源、光電二極管、相位調諧器、光柵耦合器、功率分束器等在內共9種164個光學元件,圖3所示為此工作中全集成的單片光控相控陣芯片。其中共有兩處使用了光放大器,分別是位于激光源之后分束器之前、長度為1.5 mm的前置光放大器,和相位調制波導之后耦合光柵之前、長度為3 mm的光放大器。兩處放大器的使用,在一定程度上克服了由于片上激光光源功率較小所帶來的探測距離較短的問題。
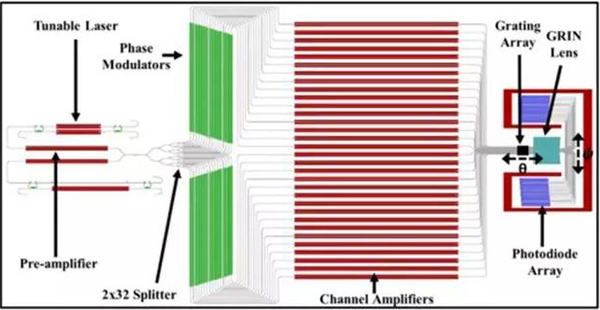
圖3、全集成光控相控陣示意圖
2016年,Intel實驗室報道了如圖4所示的非均勻布局光控相控陣。采用星形耦合器分光進入128根波導,用熱光效應調節相位,波導之間的間距由計算機模擬優化得到,可以有效地抑制旁瓣。測量得到橫向掃描角度達到了80°。光束的發散角很小,平均只有0.14°,縱向掃描利用波長調諧實現,縱向掃描角度為17°。在二維掃描的整個范圍中,有近似60000個可分辨的點。

圖4、Intel非均勻布局光控相控陣結構示意圖
2017年美國麻省理工制作了光控相控陣并且構建了激光雷達系統。系統的總體設計方案如圖5。發射端采用調頻連續光,接收端采用鍺材料,通過產生頻率不同的本地拍頻和接收到的信號混頻實現相干探測。采用三角測量的方法,對遠近不同的三個目標進行了距離測量,探測距離為2 m,測距分辨率為20 mm,首次實現了全固態相干模式下的光探測和測距。
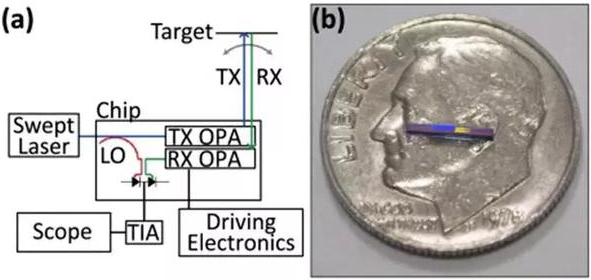
圖5、麻省理工學院全固態激光雷達結構示意圖(a)與實物照片(b)
應用正在路上
在激光雷達之前,汽車零部件供應商們布局更多的是毫米波雷達,在信息顆粒度要求不是太高的輔助駕駛中,毫米波雷達使用較廣泛。自動駕駛與激光雷達開始興起過后,在毫米波雷達市場上占據主動權的公司均開始了激光雷達市場的爭奪,并且,他們瞄準的無一例外是固態激光雷達。
由于固態激光雷達技術太新,汽車零部件通常選擇投資或并購有新技術的公司,這些新興公司主要包括Fotonic,Advanced Scientific Concepts,Leddar Tech,Innoviz,Pioneer,Innovision等。而在傳統機械雷達領域占有絕對優勢的Velodyne,在推出混合固態激光雷達Velarray后,也宣布正式開展全固態激光雷達的研究。
在全固態激光雷達領域,目前宣布已有相關技術與樣品,正在投入生產的公司主要有Quanergy,Ibeo,Innoviz等。關于產品中采用的技術細節,公司方均未具體透露。
盡管現今車載激光雷達的主流仍然是機械式激光雷達,但從長遠而言,它終究難以滿足自動駕駛普及提出的大規模、低成本、車規級需求。因此,固態激光雷達順理成章地接過了這一棒,成為了車載激光雷達的下一個發展形態,其中的關鍵技術——光控相控陣技術將得到大力發展。
實用化面臨的問題
目前硅基光電子集成光控相控陣應用到激光雷達還需要解決以下問題:
1、掃描角度
目前硅基光電子集成光控相控陣的橫向掃描角度最大為80°,對于自動駕駛汽車來說,橫向掃描角度需要達到120°。需要研究如何進一步增加掃描角度范圍。
2、柵瓣
對于波導間距相同的光控相控陣結構,波導間距不可以太近,否則會發生光波在波導之間的串擾。當器件尺寸過小時,電極之間的距離也隨之變小,電場作用會非常顯著,從而影響器件的質量。但波導間距大于二分之一波長,又會出現柵瓣,柵瓣會分散激光能量并造成干擾。通過研究表明,非等間距的波導分布可以有效的抑制柵瓣,并且保證足夠小的波束角,波導間距可以比較大。
3、探測距離
激光在傳播的過程中,會與大氣中的分子和微粒以及探測物體表面發生作用,產生吸收、散射、反射、漫射、折射和衍射等現象,回波激光信號往往非常弱。要保證一定的探測距離,需要激光的能量足夠大,和探測器的靈敏度足夠高。需要研究如何降低光控相控陣芯片的損耗,以獲得盡可能大的激光輸出。
4、掃描精度
掃描精度與光控相控陣的遠場光斑大小有關。傳統的單晶硅波導結構緊湊、體積小、熱光系數大、調節相位較為容易,但是加工誤差的容忍度較小,不利于實現相位的精確控制。而以氮化硅為材料的波導體積較大、熱光系數小、工作電壓高,但損耗小、加工誤差容忍度較大,有利于實現相位的精確調控。在不考慮器件尺寸的情況下,利用氮化硅波導制作光控相控陣有利于提高掃描精度。
5、加工工藝
高集成度的芯片式相控陣激光雷達對制作工藝提出更高的要求。為了使得波導之間可以實現相位干涉,各波導之間需要有固定的相位差。如果由加工誤差導致波導上有隨機相位,這將對激光雷達的光束質量產生很壞的影響。需要研究加工工藝技術,盡可能使光波導陣列具有最好的均勻性和一致性。
展望
硅基光電子技術憑借成熟的CMOS工藝,可以實現高精度的加工和大規模的生產。硅基光電子技術及圖像處理算法等科技的不斷進步,廉價的芯片式全固態激光雷達不久將會進入人們的日常生活當中。
參考文獻
莊東煒,韓曉川,李雨軒,宋俊峰 硅基光電子集成光控相控陣的研究進展[J]. 激光與光電子學進展, 2018, 55(5): 50001
封面圖來源:激光與光電子學進展
 粵公網安備 44030902003195號
粵公網安備 44030902003195號