海事雷達是全球商業、運輸和國防的關鍵組成部分。和所有雷達一樣,傳感器發射定向電磁波能量,然后測量與雷達場景中的物體相互作用后再輻射回傳感器的接收天線中的能量。
海洋環境下的雜波最重要來源是海洋本身,也就是大家所知道的“海雜波”。

由于海面具有高動態特性,對海上和沿海雷達系統而言,海雜波尤其具有挑戰性。電磁波以接近水平的入射角與海面相互作用,在如此低的掠射角度下,為了恒虛警率(CFAR)檢測而建模的海雜波統計分布不再適用。
海上雷達系統跟蹤的目標可能被海雜波產生的虛假警報所淹沒,而導致感興趣的目標在強海雜波背景下可能檢測不到。盡管數十年來進行了大量嘗試來設計一種緩解低掠射角海雜波的手段,但以前的方法要么在計算上不切實際,要么缺乏魯棒性。
MIT林肯實驗室正在探索使用極化雷達測量來減輕低掠射角海雜波影響的可行性。2015年10月,研究人員組裝了一套X波段全極化雷達系統,并收集了雷達測量數據。所得到的數據集涵蓋各種波形方案、帶寬,海況以及目標等。
Polarimetric Co-location Layering, PCL
利用這些數據,研究人員開發了PCL算法,它可以濾除海雜波以保留目標回波,從而減少虛警,并且能夠直接適應雷達處理系統。
常規雷達處理系統在相干處理時間間隔(CPI)內產生一系列距離-多普勒域中的檢測結果,每個CPI的檢測結果都會輸入到雷達的跟蹤器中。跟蹤器假定所有檢測都是由目標引起的,并嘗試將傳入的檢測結果與先前的檢測結果相關聯,以跨CPI建立目標跟蹤。
在一個給定的CPI內,對水平極化(HH)和垂直極化(VV)的每一個“距離-多普勒”域數據進行的二維CFAR檢測結果,以及距離-時間幅度結果都會并行輸入到PCL中(見下圖)。
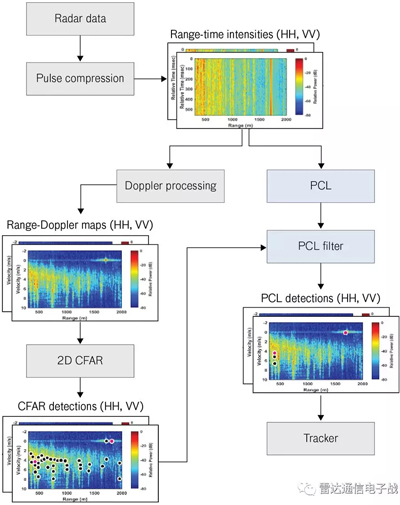
PCL建立的基本原理是海面的多普勒頻譜是與極化相關的。具體來說,由HH雷達測量的海面的平均速度與VV雷達測量的速度不同。也就是說由HH檢測的海雜波的速度在CPI內與VV測量的海雜波的速度不同。
但是,對于目標檢測來說并不是如此。如果一個點目標在HH和VV測量中都有信號,那么這個目標在CPI內的兩個極化方向上相對于雷達的徑向速度大致相同。
PCL算法利用這個原理來濾除最終給跟蹤器的檢測結果中的海雜波導致的虛警。在每個CPI上,PCL包含以下2個步驟:
1 將HH和VV通道內的檢測結果關聯起來;
2 監測CPI中檢測對的位移,以確定哪些對隨著時間的變化而一起移動。
以這種方式可以區分不同的物體,并且與海雜波不同。PCL將由于海雜波造成的標準CFAR虛警率降低多達兩個數量級,同時保留目標檢測性能。
由于海雜波依賴于雷達波長和觀測方向,林肯實驗室團隊預計,包含多個波段和觀測方向的更廣闊的數據收集將會更好的驗證PCL。對于海上應用,能夠測量HH和VV極化的雷達比單極化雷達的性能有顯著提高。
雖然極化雷達系統對設計和應用來說更加復雜和昂貴,但這些考慮必須與使用PCL可減輕低掠射角海雜波的解決方案所獲得的能力加以權衡。
 粵公網安備 44030902003195號
粵公網安備 44030902003195號