汽車雷達系統通常采用FMCW技術

與脈沖雷達相比,FMCW雷達更小,使用更少的功率,而且成本更低。但是,FMCW雷達比較適合于近程探測。自動巡航控制(ACC)的汽車雷達(LRR)通常采用77 GHz附近的頻帶。雷達系統通過不斷地估計其所在車輛和其前方的車輛之間的相對距離和速度,并及時告警駕駛員。
FMCW的距離測量原理
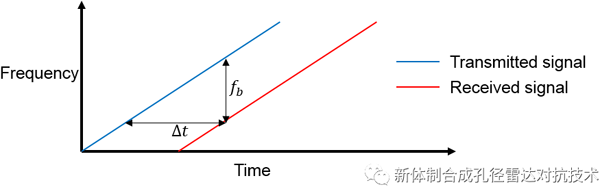
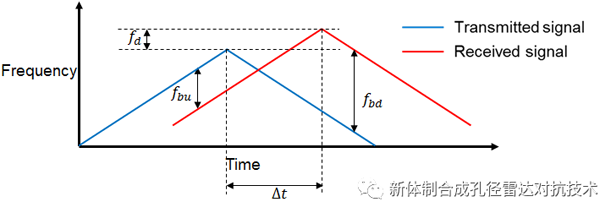
接收信號是發射信號的時間延遲,延遲量與汽車間相對距離有關。在頻率掃描期間的任何時刻,發送信號和接收信號之間的頻率差fb是常數,稱為拍頻。因為掃描斜率不變,所以可以從拍頻得到時間延遲,然后將延遲轉換為距離。
根據需求分析參數
在ACC中,雷達需要監測的最大范圍大約為200米,掃描時間應該是往返時間的至少5到6倍,根據最大范圍所需的時間來計算掃描時間約為8us。
系統需要能夠區分相距1米的兩個目標,根據距離分辨率確定掃描帶寬150MHz,并用掃描帶寬和掃描時間計算掃描斜率。
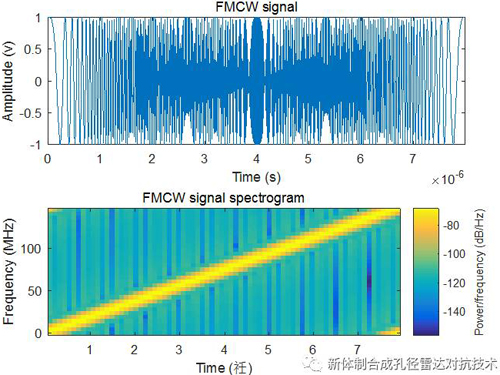
· 對于復采樣信號,采樣率可以設置為與帶寬相同。· 雷達需要檢測的最大拍頻是對應于最大距離的拍頻和最大多普勒頻率的和。根據實際情況假設行駛車的最高速度約為230km/h,計算可得最大距離對應的拍頻為25MHz,最大速度對應的多普勒偏移為32.8KHz。
根據以上兩點,系統需要的采樣率設置為150MHz。發射信號及其頻譜如下圖所示。
雷達系統設置
雷達系統包括發射機,接收機和天線,對主要組件進行建模,并省略其他組件(如耦合器和混頻器)的影響。另外,為了簡單起見,假設天線是各向同性的,并且天線的增益包括在發射機和接收機中。
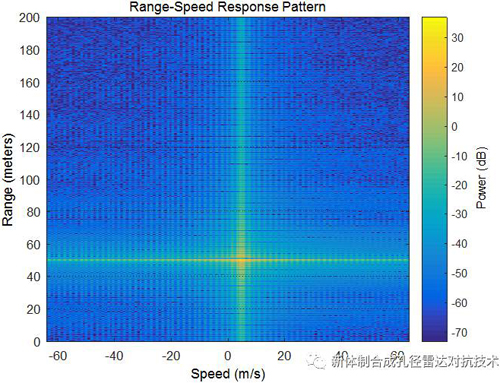
雷達通常也在運動中,假定雷達隨汽車正沿著x軸以30m/s的速度行進,同時前方距離50m處有一輛以25m/s的速度同向行進的汽車。因此,汽車目標以5m/s的相對速度接近雷達。
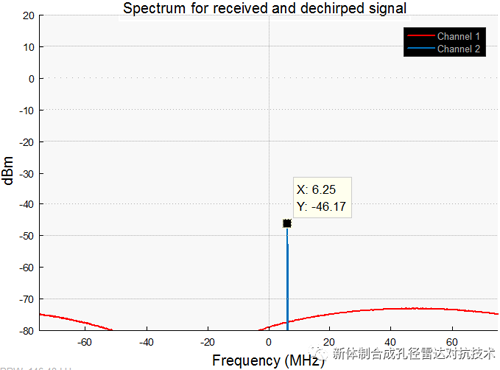
FMCW雷達通過拍頻來測量距離,為了提取該頻率,需要將接收信號與發送信號混合來進行去斜操作,去斜后的信號僅包含對應于目標范圍的各個頻率分量。
在一個脈沖內,多普勒頻率與拍頻不可區分。為了測量距離和多普勒,FMCW雷達通常執行以下操作:
· 波形發生器產生FMCW信號。· 發射機和天線放大信號并將信號輻射到空間。
· 信號傳播到目標,被目標反射,并傳播回雷達。
· 接收天線收集信號。
· 接收的信號被去斜后存儲。
· 多個脈沖后,在距離和多普勒中執行傅里葉變換以提取拍頻以及多普勒頻移。然后可以使用這些結果估計目標的范圍和速度。距離和多普勒也可以顯示為圖像,并給出目標在范圍和速度域中的位置的直觀指示。
距離多普勒耦合效應
目標距離對應于拍頻,準確的距離估計取決于拍頻的精確估計。然而,多普勒頻移的存在改變了拍頻,導致距離估計偏差。本設置中,由目標和雷達之間的相對速度引起的距離誤差是0.02m,可以安全忽略。

上面的設計足以實現期望的性能,但是在上述設置中,掃描時間約為8微秒,系統需要在非常短的時間內掃描150MHz頻帶,會導致成本增加。此外,考慮到汽車的速度,并不需要每8微秒進行測量。
因此,汽車雷達經常使用更長的掃描時間,例如1ms。較長的掃描時間使得多普勒耦合的范圍更加突出。 為解決這個問題,可采用三角掃描模式。
 粵公網安備 44030902003195號
粵公網安備 44030902003195號