
富士通研究開發中心有限公司開發了在異步無線通信系統中利用多徑特征指紋及粒子濾波實現室內定位追蹤技術。該技術通過充分利用信號的多徑傳播特性來提高室內定位精度,利用兩步定位(或稱粗細定位)方法實現異步無線系統中的定位功能,采用地圖匹配輔助的粒子濾波技術實現動態的1米級精度的定位追蹤性能。該技術可低成本的快速實現各類室內定位應用。
有關該技術的詳細內容于9月21日在加拿大蒙特利爾舉行的“2016 IEEE 84TH Vehicular Technology Conference: VTC2016-Fall”會議上進行了說明。
開發背景
基于位置的服務(Location Based Service, LBS)市場需求逐年劇增,而定位技術是LBS系統的關鍵部分。在室內區域,定位技術可廣泛用于商場、博物館、展覽館、停車場、醫院、倉儲等領域,以提供精準的商業廣告投放、室內導航、物品管理等服務以及輔助基于虛擬現實的室內游戲開發之中。高精度的室內定位技術有利于增強LBS的服務質量,為人們提供更好的數字化生活服務。
課題
全球定位系統(Global Positioning System, GPS)在室內定位應用中失效,而傳統的基于TOA(Time of Arrival)、TDOA(Time Difference of Arrival)的室內無線定位方法的定位精度受信號的非視距(None-line-of-sight, NLOS)傳播、多徑傳播及陰影效應的影響而降低。同時,傳統方法要求系統中收發機之間、發射機之間精準的同步功能,使得定位系統更加復雜化。
開發的技術
富士通研究開發中心利用軟件無線電(Software Defined Radio, SDR)平臺實現室內定位系統的原型機開發,如圖1所示。在室內GPS失效時,發射機可發射GPS或WiFi等無線網絡參考信號,接收機接收信號后提取多徑特征(Multipath Profile, MP)及接收信號強度(Received Signal Strength, RSS),然后由終端進行位置估計,從而實現室內定位。
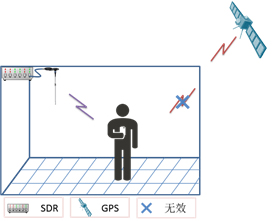
圖1: 室內定位系統
本定位追蹤系統具有以下關鍵技術:
1. 兩步指紋定位技術
所謂指紋定位,是指在離線階段在預定區域內的參考點處采集信號特征集作為當前參考點處的指紋,并存儲于數據庫中;在在線定位階段,通過實時的指紋信息與數據庫中的指紋進行匹配,查找最佳匹配的參考點來進行位置估算。
為實現異步無線系統的定位估算,首先通過RSS指紋定位獲取終端所在的粗區域,如圖2所示粉紅區域,然后通過匹配在線測量的多徑特征指紋與該粗區域內參考點處的指紋來獲取最佳匹配的參考點位置以估計終端的精確位置。多徑特征指紋匹配首先需要采用最大相關準則來對齊兩個多徑特征,去噪后通過向量余弦的方法計算兩個對齊的多徑特征的相似度,如圖3所示。相似度最大的參考點將被選擇以估計終端的精確位置。
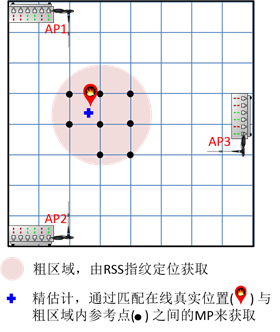
圖2: 兩步指紋定位 多徑特征對齊與去噪
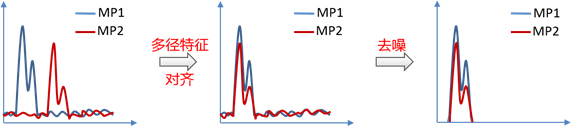
圖3: 多徑特征對齊與去噪
2. 基于地圖匹配輔助的粒子濾波技術
粒子濾波技術主要由粒子狀態預測、粒子權重更新、粒子重采樣三部分組成。圖4是所述粒子濾波模型。粒子的狀態預測基于一種魯棒性運動模型,即粒子狀態轉移模型中的步長與航向兩個參數是服從均勻分布的;粒子權重的更新引用了新的地圖匹配模型來增強性能,即系統先通過上一時刻的位置估計找出最近的一條路徑,然后根據各粒子與該路徑中心的距離來更新粒子的權重。
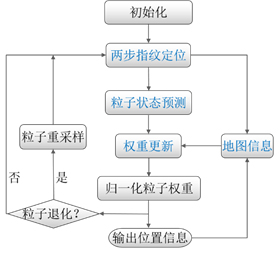
圖4: 粒子濾波模型
效果
通過本技術,實現了異步無線定位技術,降低了定位系統的復雜度;充分利用多徑傳播特性使定位精度提高了38.9%;在地圖匹配輔助下的粒子濾波技術實現了1米級的定位追蹤性能。同時,該方案可適用于現有的WiFi、LTE等無線網絡定位技術之中。
今后
目前,該粒子濾波技術適用于中低速運動狀態的定位追蹤場景。未來,富士通研究開發中心將對采用融合慣性傳感器以獲取快速運動模式下的高精度定位追蹤性能,并積極推進所研技術在實際LBS中的商業化應用。
")
 粵公網安備 44030902003195號
粵公網安備 44030902003195號